|
|
|
|
|
|
|
|
|
|
Coyote Dual Modular Receiver System
The Coyote� is a high performance,
modular receiver system providing two unique and independent RSSI
measurements using precision dual receivers.
Coyote� is designed from the ground up to provide
hot-swappable components including removable/rechargeable Li-Ion
battery, Compact Flash� storage, removable 12-channel GPS receiver
module and two removable receiver modules. Optional, GPS-based
Forecaster� mapping software makes Coyote�
the most comprehensive receiver system available to engineers today.
 Download a technical paper on 40 Lambda Conversion
Download a technical paper on 40 Lambda Conversion
Download Coyote
data sheet
Download Coyote
manual from the Technical Support section

USB Compliant
|
|
Features |
- Multiple bands supported including
Wi-MAX, Cellular, GSM, LMR, PCS, ISM, WCS, MMDS and more
- Dual modular receivers allow users
to swap various bands while in the field
- High measurement rate, more than
twice that of Dr. Lee's recommended 40 lambda
- Removable 12-channel/12 satellite
GPS modular receiver with active antenna
- Removable rechargeable Li-Ion
battery system found on standard PC laptops
- Removable Compact Flash (64MB card
included) memory system for data storage
- Captured data output via USB and
serial ports for connectivity to any PC
- Optional GPS-based mapping
Forecaster� PC software
- Weighs only 7 pounds fully loaded
Back to Top
|
|
Specifications |
|
RECEIVER
SENSITIVITY: |
|
|
Sensitivity |
-118 to -30 dB + 1 dB (@ 10 KHz IF Bandwidth) |
|
Adj. Chan. Rejection |
> 45 dB @ 30 KHz |
|
RECEIVER MODES: |
|
|
RSSI Measurement |
single channel
multiple channel (user selectable or sweep)
|
|
DATA AVERAGING: |
|
|
RSSI Measurement |
|
Spatial
|
|
512 measurements/receiver/second
|
512 measurements/receiver/second |
|
40 lambda average (user selectable)
|
|
|
GENERAL SPECIFICATIONS: |
|
|
Dual Conversion |
83 MHz first IF, 455 KHz second
IF |
|
IF Bandwidth |
4 KHz, 10 KHz, 25 KHz, 30 KHz,
50 KHz or 200 KHz available (@ 6dB) |
|
Stability |
+2.5 PPm from freezing
to 120 degrees F |
|
Phase Noise |
> 80 DBC/Hz @ 10 KHz |
|
Antenna |
SMA 50 ohms |
|
Controls |
20 button keypad |
|
Warm -Up Time |
< 3 minutes |
|
Power |
-
Internal Removable 10.8 Volt Li-Ion
battery
-
battery run time 8 hours
-
12V jack for external power
|
|
MECHANICAL SPECIFICATIONS: |
|
|
USB Port |
12 Mbits/s (1.5 MB/s) |
|
GPS |
12-channel
receiver |
|
Weight |
5 lbs. (7 lbs.
fully loaded) |
|
Dimensions |
3.5" H x 6" W
x 7.75" L |
|
Approvals |
UL, CSA |
|
INCLUDED ACCESSORIES: |
|
|
Antenna |
Straight
SMA male 50 ohm |
|
Car
Lighter Adapter |
12-16
VDC @ 200 mA |
|
Charger |
External fast charger
for Li-Ion batteries |
|
ChameleonCW & Coyote
Data Logger |
file conversion
software for Windows
NT, 2000, XP |
|
Back to Top
|
|
|
Frequencies |
|
ISM 900-932
MHz, 2.400-2.485 GHz
PCS Uplink
(Blocks A through F)
1850-1910
Downlink (Blocks A
through F) 1930-1995
MHz
LMR 805-825
MHz
MMDS
2.5-2.7 GHz
Wi-MAX
2.5 or 3.4 GHz
iDEN/SMR
850-870 MHz
Cellular
824-848, 869-893 MHz
tunable in 30 kHz
steps
ETACS
872-905, 915-950 MHz
Paging
145-165, 450-465,
928-941 MHz
WCS 2.3-2.36
GHz
1.4 GHz
(custom frequency)
1.5 GHz
(custom frequency)
3.5 GHz
(custom frequency)
5.8 GHz
(custom frequency)
Back to Top
|
|
Software |
Data from the
Coyote
measurements are saved
to a 64 Mbyte CF card
and to a USB port and
RS-232 serial port for
direct storage to a PC
(up to 38K baud,
selectable). The ATA
card data can be
inserted directly into
a PC. Serial output
may be binary
compressed for later
conversion or in an
ASCII comma delimited
format. Using
Chameleon software
from BVS, the
Coyote's
data can be imported
directly into
third-party software.
Coyote has
optional software
available called
Forecaster.
Forecaster is a
GPS-based mapping
system for PCS,
Cellular, ISM, LMR,
Paging, etc. (works
with any receiver
module you can put
into the
Coyote.
|
|
 |
|
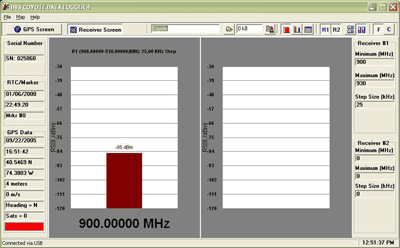
Coyote Data Logger
Measurement Screen
|
|
 |
|
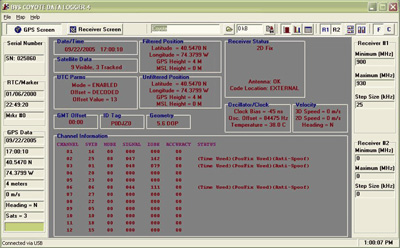
Coyote Data Logger GPS
Screen
|
|
 |
|
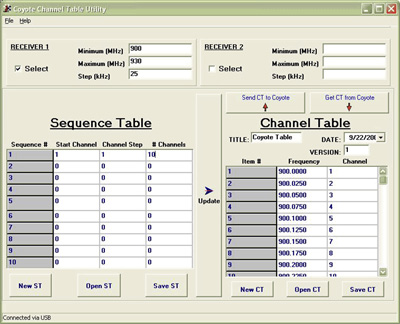
Coyote Channel Table
Editor Screen
Back to Top
|
|
Options |
|
 |
|
2500-2700 MHz
(8.5 dBi gain)
Mag-Mount Antenna
(perfect for drive
studies)
|
|
 |
|
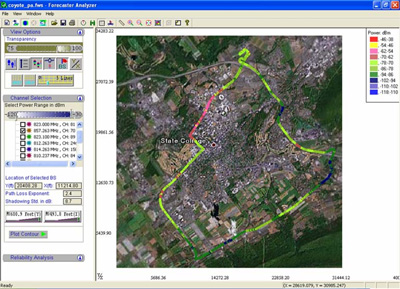
Forecaster PC software
allows Coyote to overlay
all drive-study
measurements for overall
RF coverage.
Back to Top
|
|
FAQs |
Can I export Coyote data
into my favorite mapping
program?
Yes. Coyote supports a
variety of
post-processing
software.
Can I use Coyote in
GPS-based drive-studies?
Yes. Coyote is available
with an optional,
removable 12-channel GPS
receiver and supporting
software perfect for
drive-studies.
How do I get the data
into my PC?
Use the Coyote Data
Logger software to
download the data off
the CF storage card
included with your
Coyote.
What is the significance
of Rayleigh Fading in
coverage measurements
with 40 Lambda criteria?
There are two types of
fading that are relevant
to performing coverage
measurements, fast
fading, also know as
Rayleigh fading, and
terrain based fading due
to obstructions and
propagation loss. The
goal of coverage
measurement is to
measure the local signal
strength in presence of
terrain based fading.
Rayleigh fading is due
to close in reflections.
It produces drops in
signal strength that are
only a fraction of a
wavelength in size
(often on the scale of
inches). These fades
always exist and are
only of interest in the
sense that coverage
measurements must be
made in a manner that
rejects Rayleigh fading,
so that actuate
measurements of terrain
based fading can be
made.
William C. Y. Lee
derived a well accepted
criteria for removing
Rayleigh fading and
retaining slower terrain
based fading, known as
40 Lamba averaging [W.C.
Y. Lee and Y. S. Yeh,
�On the Estimation of
the Second-Order
Statistics of Log Normal
Fading in Mobile Radio
Environment�, IEEE
Trans. Comm., vol. 22,
June 1974, pp. 869-873]
(You can find an easier
to read version of this
criteria in most mobile
communications text
books). In order to
remove Rayleigh fading,
you should average data
for a time period equal
to the time it takes to
traverse 40 wavelengths
in your measurement
vehicle and you should
have no less than 36 to
50 points in that time.
For the remainder of
this text we will assume
40 points to make the
calculations easier.
The biggest
misconception with
applying the 40-Lamba
criteria to coverage
measurements is that all
measurements should be
made with an averaging
time exactly equal to
40-Lamda. While 40-Lamda
is the minimum filtering
that needs to be done to
reject Rayleigh, it is
not the most appropriate
averaging time for
coverage analysis. In
almost all coverage
analysis, the 40-Lamda
averaged samples must be
averaged further. Due to
the accuracy and
reporting rate of
position measurement
devices (GPS for
instance) and the real
practical problem of too
much data this extra
averaging is valid and
necessary. Clearly, the
averages of averages is
just a longer average,
and the resulting data
no longer has an
integration time of
forty wavelengths.
That is not to say that
the 40-Lamda criteria
does not apply to
coverage analysis. In
fact it is very
important. From the
criteria, the minimum
sampling rate is about
once per wavelength at
the fastest vehicle
speed. At 800MHz, for
example, a wavelength is
about a foot. Using the
40-Lamda criteria, an
initial sampling rate of
88 samples per second is
needed to make
measurements with a
maximum drive speed of
60 mile per hour.
It is important to
realize that Rayleigh
fading is a spatial
phenomenon not a time
one. The averaging is
actually intended to be
done over a distance of
forty wavelengths. Since
most people performing
coverage analysis
average samples
spatially after they are
collected. That is to
say, all the samples
within a grid on a map
are averaged to produce
one point. To insure
rejection of Rayleigh
fading, the grid size
must be larger than
forty wavelengths. This
in general is not a
problem. At 800MHz,
forty wavelengths is
about 40 feet. Generally
much larger grid sizes
are used.
A Practical
Example
A BVS Coyote receiver
and
Gator transmitter
are going to be used to
do pre-site survey at
800MHz. The Gator
transmitter is hoisted
up on a crane and the
drivers are sent out to
perform the drive study.
Since the Coyote
receiver, in single
channel mode, has an
internal sampling rate
of 512 samples per
second regardless of
internal averaging, we
can calculate the
maximum drive speed that
is allowed. Since we
want to have at least
one sample per
wavelength, as per
40-Lamda, the maximum
speed would be
1ft*512/sec or 349 miles
per hour! Obviously, the
Coyote can be used for
coverage analysis at any
speed.
Since 512 points per
second is far too much
data to be processed,
further data reduction
is desired. The Coyote
has internal filtering
and decimation and the
output rate can be
reduced to 1 report a
second. Each report is
the average of all data
received during that
second, so we still have
an initial sampling rate
of 512 samples per
second. This setting is
the most convenient
since the internal GPS
receiver in the Coyote
reports position once
per second. At this
point we have
statistically correct
data samples each with a
position stamp.
The data should be
spatially averaged in
post processing. Since
forty wavelengths is
only forty feet at this
frequency, almost any
convenient grid size
will do. Remember that
the accuracy of GPS,
with selective addition
off, is only about 30
meters, so grid sizes
larger than that would
be appropriate. In
expensive post
processing software the
grid size can be
selected. When
processing data
yourself, it is often
convenient to make the
grid based on Latitude
and Longitude from the
GPS receiver. In the New
York area, one degree of
latitude is 69 miles and
one degree of longitude
is 50 miles. Therefore,
averaging data with the
first three decimal
places the same would be
an easy way of getting
an appropriate grid size.
Back to Top
|
|
|
|